Viscoelastic networks: dynamical behaviour
Another interesting aspect of marginal networks is their
behaviour in the presence of a solvent. When a dynamical
shear (e.g. a shear strain with a fixed amplitude which
oscillates with frequency ω)
is applied to a network in a fluid, a viscous drag will act
on it. Furthermore, as the network collide with the fluid
particles it generates a hydrodynamic flow field, allowing
the network filaments to interact with each other via the
fluid. For such a dynamically oscillating system one can
measure the dynamical shear
modulus G* = G' +
G'',
with G' the storage
modulus (the stored energy, i.e. the elastic part from the
springs) and G'' the
loss modulus (the energy dissipated as heat, i.e. the
viscous part).
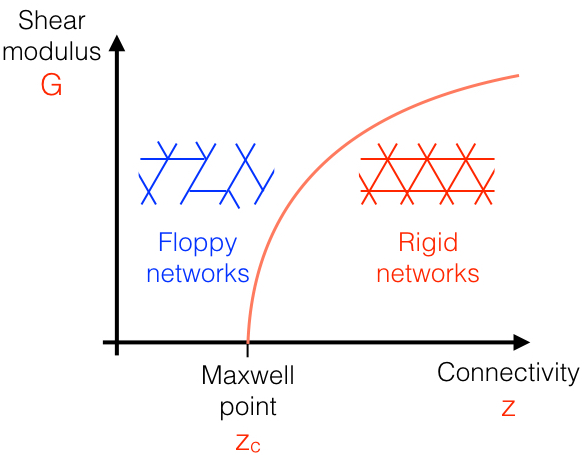
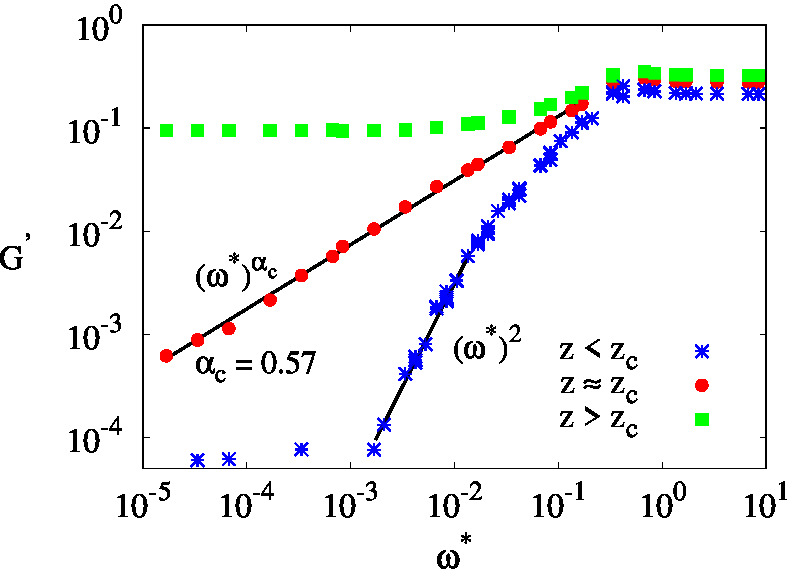
For networks which are mechanically floppy one would
expect the modulus to behave as
a Maxwell
fluid, where the storage modulus, for example, scales
with the shear frequency as G'
∝
ω2. Using
computer simulations we show that this is indeed the
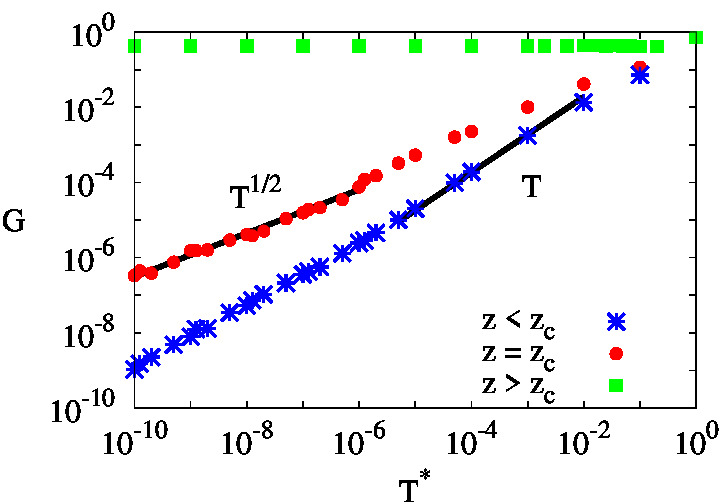
case for sub-marginal networks. For marginal networks,
however, one finds, as for temperature, a sub-linear
scaling, with G' ∝
ωαk1-α,
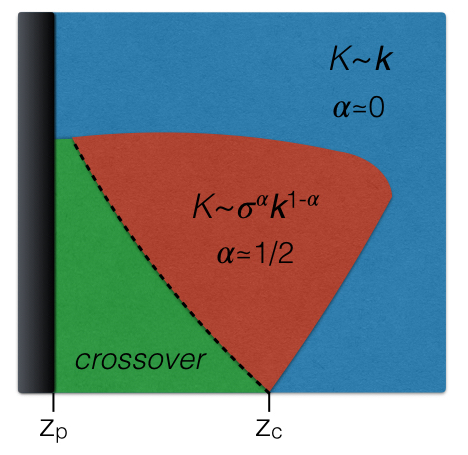
with α<1, again resulting in
a network which is anomalously rigid. Interestingly, the
exponent α depends on the
strength of the hydrodynamic interactions between the
network nodes, and can in fact be controlled by varying
parameters such as the density of the fluid, giving another
potential control parameter for the system
behaviour.